import math, matplotlib.pyplot as plt, operator, torch
from functools import partialThis is not my content it’s a part of Fastai’s From Deep Learning Foundations to Stable Diffusion course. I add some notes for me to understand better thats all. For the source check Fastai course page.
Clustering
Clustering techniques are unsupervised learning algorithms that try to group unlabelled data into “clusters”, using the (typically spatial) structure of the data itself. It has many applications.
The easiest way to demonstrate how clustering works is to simply generate some data and show them in action. We’ll start off by importing the libraries we’ll be using today.
torch.manual_seed(42)
torch.set_printoptions(precision=3, linewidth=140, sci_mode=False)Create data
n_clusters=6
n_samples =250To generate our data, we’re going to pick 6 random points, which we’ll call centroids, and for each point we’re going to generate 250 random points about it.
centroids = torch.rand(n_clusters, 2)*70-35centroidstensor([[ 26.759, 29.050],
[ -8.200, 32.151],
[ -7.669, 7.063],
[-17.040, 20.555],
[ 30.854, -25.677],
[ 30.422, 6.551]])from torch.distributions.multivariate_normal import MultivariateNormal
from torch import tensor
More info for covariance matrix is on the lesson 9B.
def sample(m): return MultivariateNormal(m, torch.diag(tensor([5.,5.]))).sample((n_samples,))slices = [sample(c) for c in centroids]
data = torch.cat(slices)
data.shapetorch.Size([1500, 2])Below we can see each centroid marked w/ X, and the coloring associated to each respective cluster.
def plot_data(centroids, data, n_samples, ax=None):
if ax is None: _,ax = plt.subplots()
for i, centroid in enumerate(centroids):
samples = data[i*n_samples:(i+1)*n_samples]
ax.scatter(samples[:,0], samples[:,1], s=1)
ax.plot(*centroid, markersize=10, marker="x", color='k', mew=5)
ax.plot(*centroid, markersize=5, marker="x", color='m', mew=2)plot_data(centroids, data, n_samples)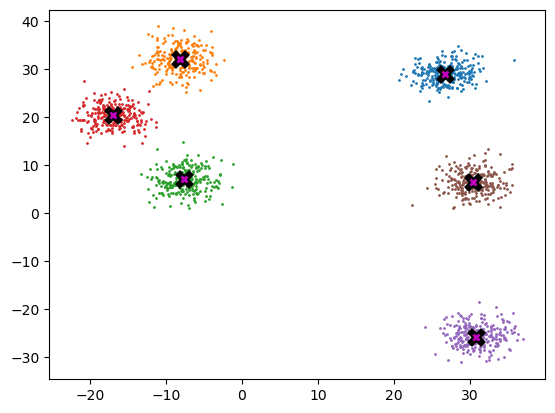
Mean shift
Most people that have come across clustering algorithms have learnt about k-means. Mean shift clustering is a newer and less well-known approach, but it has some important advantages: * It doesn’t require selecting the number of clusters in advance, but instead just requires a bandwidth to be specified, which can be easily chosen automatically * It can handle clusters of any shape, whereas k-means (without using special extensions) requires that clusters be roughly ball shaped.
The algorithm is as follows: * For each data point x in the sample X, find the distance between that point x and every other point in X * Create weights for each point in X by using the Gaussian kernel of that point’s distance to x * This weighting approach penalizes points further away from x * The rate at which the weights fall to zero is determined by the bandwidth, which is the standard deviation of the Gaussian * Update x as the weighted average of all other points in X, weighted based on the previous step
This will iteratively push points that are close together even closer until they are next to each other.
midp = data.mean(0)
midptensor([ 9.222, 11.604])plot_data([midp]*6, data, n_samples)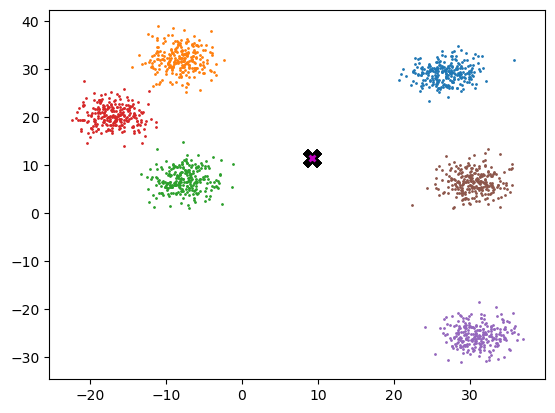
So here’s the definition of the gaussian kernel, which you may remember from high school… This person at the science march certainly remembered!

def gaussian(d, bw): return torch.exp(-0.5*((d/bw))**2) / (bw*math.sqrt(2*math.pi))def plot_func(f):
x = torch.linspace(0,10,100)
plt.plot(x, f(x))plot_func(partial(gaussian, bw=2.5))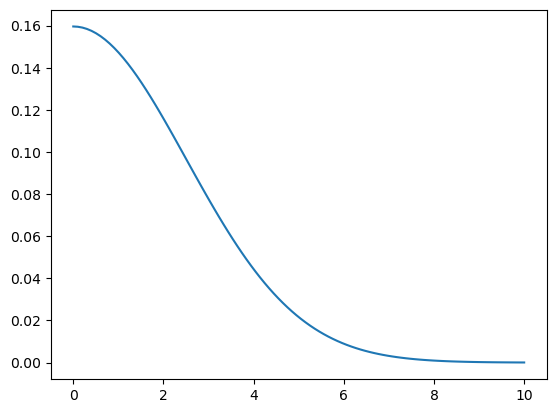
:::{{ callout-note }} ## Partial functions are cool :::
partialfunctools.partialIn our implementation, we choose the bandwidth to be 2.5.
One easy way to choose bandwidth is to find which bandwidth covers one third of the data.
def tri(d, i): return (-d+i).clamp_min(0)/iplot_func(partial(tri, i=8))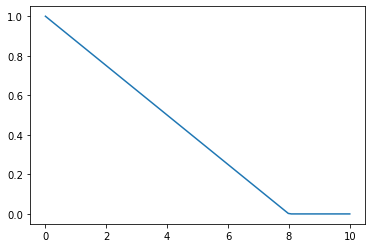
X = data.clone()
x = data[0]xtensor([26.204, 26.349])x.shape,X.shape,x[None].shape(torch.Size([2]), torch.Size([1500, 2]), torch.Size([1, 2]))(x[None]-X)[:8]tensor([[ 0.000, 0.000],
[ 0.513, -3.865],
[-4.227, -2.345],
[ 0.557, -3.685],
[-5.033, -3.745],
[-4.073, -0.638],
[-3.415, -5.601],
[-1.920, -5.686]])(x-X)[:8]tensor([[ 0.000, 0.000],
[ 0.513, -3.865],
[-4.227, -2.345],
[ 0.557, -3.685],
[-5.033, -3.745],
[-4.073, -0.638],
[-3.415, -5.601],
[-1.920, -5.686]])# rewrite using torch.einsum
dist = ((x-X)**2).sum(1).sqrt()
dist[:8]tensor([0.000, 3.899, 4.834, 3.726, 6.273, 4.122, 6.560, 6.002])weight = gaussian(dist, 2.5)
weighttensor([ 0.160, 0.047, 0.025, ..., 0.000, 0.000, 0.000])weight.shape,X.shape(torch.Size([1500]), torch.Size([1500, 2]))weight[:,None].shapetorch.Size([1500, 1])weight[:,None]*Xtensor([[ 4.182, 4.205],
[ 1.215, 1.429],
[ 0.749, 0.706],
...,
[ 0.000, 0.000],
[ 0.000, 0.000],
[ 0.000, 0.000]])def one_update(X):
for i, x in enumerate(X):
dist = torch.sqrt(((x-X)**2).sum(1))
# weight = gaussian(dist, 2.5)
weight = tri(dist, 8)
X[i] = (weight[:,None]*X).sum(0)/weight.sum()def meanshift(data):
X = data.clone()
for it in range(5): one_update(X)
return X%time X=meanshift(data)CPU times: user 453 ms, sys: 0 ns, total: 453 ms
Wall time: 452 msplot_data(centroids+2, X, n_samples)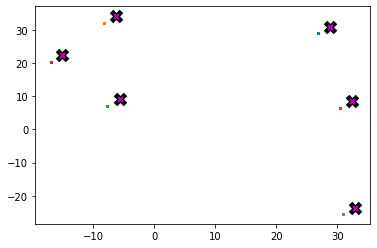
Animation
from matplotlib.animation import FuncAnimation
from IPython.display import HTMLdef do_one(d):
if d: one_update(X)
ax.clear()
plot_data(centroids+2, X, n_samples, ax=ax)# create your own animation
X = data.clone()
fig,ax = plt.subplots()
ani = FuncAnimation(fig, do_one, frames=5, interval=500, repeat=False)
plt.close()
HTML(ani.to_jshtml())GPU batched algorithm
To truly accelerate the algorithm, we need to be performing updates on a batch of points per iteration, instead of just one as we were doing.
bs=5
X = data.clone()
x = X[:bs]
x.shape,X.shape(torch.Size([5, 2]), torch.Size([1500, 2]))def dist_b(a,b): return (((a[None]-b[:,None])**2).sum(2)).sqrt()dist_b(X, x)tensor([[ 0.000, 3.899, 4.834, ..., 17.628, 22.610, 21.617],
[ 3.899, 0.000, 4.978, ..., 21.499, 26.508, 25.500],
[ 4.834, 4.978, 0.000, ..., 19.373, 24.757, 23.396],
[ 3.726, 0.185, 4.969, ..., 21.335, 26.336, 25.333],
[ 6.273, 5.547, 1.615, ..., 20.775, 26.201, 24.785]])dist_b(X, x).shapetorch.Size([5, 1500])X[None,:].shape, x[:,None].shape, (X[None,:]-x[:,None]).shape(torch.Size([1, 1500, 2]), torch.Size([5, 1, 2]), torch.Size([5, 1500, 2]))weight = gaussian(dist_b(X, x), 2)
weighttensor([[ 0.199, 0.030, 0.011, ..., 0.000, 0.000, 0.000],
[ 0.030, 0.199, 0.009, ..., 0.000, 0.000, 0.000],
[ 0.011, 0.009, 0.199, ..., 0.000, 0.000, 0.000],
[ 0.035, 0.199, 0.009, ..., 0.000, 0.000, 0.000],
[ 0.001, 0.004, 0.144, ..., 0.000, 0.000, 0.000]])weight.shape,X.shape(torch.Size([5, 1500]), torch.Size([1500, 2]))weight[...,None].shape, X[None].shape(torch.Size([5, 1500, 1]), torch.Size([1, 1500, 2]))num = (weight[...,None]*X[None]).sum(1)
num.shapetorch.Size([5, 2])numtensor([[367.870, 386.231],
[518.332, 588.680],
[329.665, 330.782],
[527.617, 598.217],
[231.302, 234.155]])torch.einsum('ij,jk->ik', weight, X)tensor([[367.870, 386.231],
[518.332, 588.680],
[329.665, 330.782],
[527.617, 598.218],
[231.302, 234.155]])weight@Xtensor([[367.870, 386.231],
[518.332, 588.680],
[329.665, 330.782],
[527.617, 598.218],
[231.302, 234.155]])div = weight.sum(1, keepdim=True)
div.shapetorch.Size([5, 1])num/divtensor([[26.376, 27.692],
[26.101, 29.643],
[28.892, 28.990],
[26.071, 29.559],
[29.323, 29.685]])def meanshift(data, bs=500):
n = len(data)
X = data.clone()
for it in range(5):
for i in range(0, n, bs):
s = slice(i, min(i+bs,n))
weight = gaussian(dist_b(X, X[s]), 2.5)
# weight = tri(dist_b(X, X[s]), 8)
div = weight.sum(1, keepdim=True)
X[s] = weight@X/div
return XAlthough each iteration still has to launch a new cuda kernel, there are now fewer iterations, and the acceleration from updating a batch of points more than makes up for it.
data = data.cuda()X = meanshift(data).cpu()%timeit -n 5 _=meanshift(data, 1250).cpu()2 ms ± 226 µs per loop (mean ± std. dev. of 7 runs, 5 loops each)plot_data(centroids+2, X, n_samples)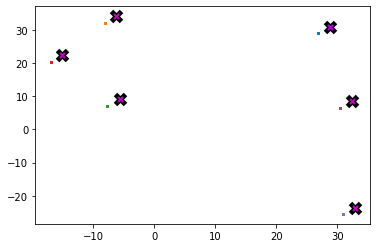
Homework: implement k-means clustering, dbscan, locality sensitive hashing, or some other clustering, fast nearest neighbors, or similar algorithm of your choice, on the GPU. Check if your version is faster than a pure python or CPU version.
Bonus: Implement it in APL too!
Super bonus: Invent a new meanshift algorithm which picks only the closest points, to avoid quadratic time.
Super super bonus: Publish a paper that describes it :D